
{kind=link}
Abstract
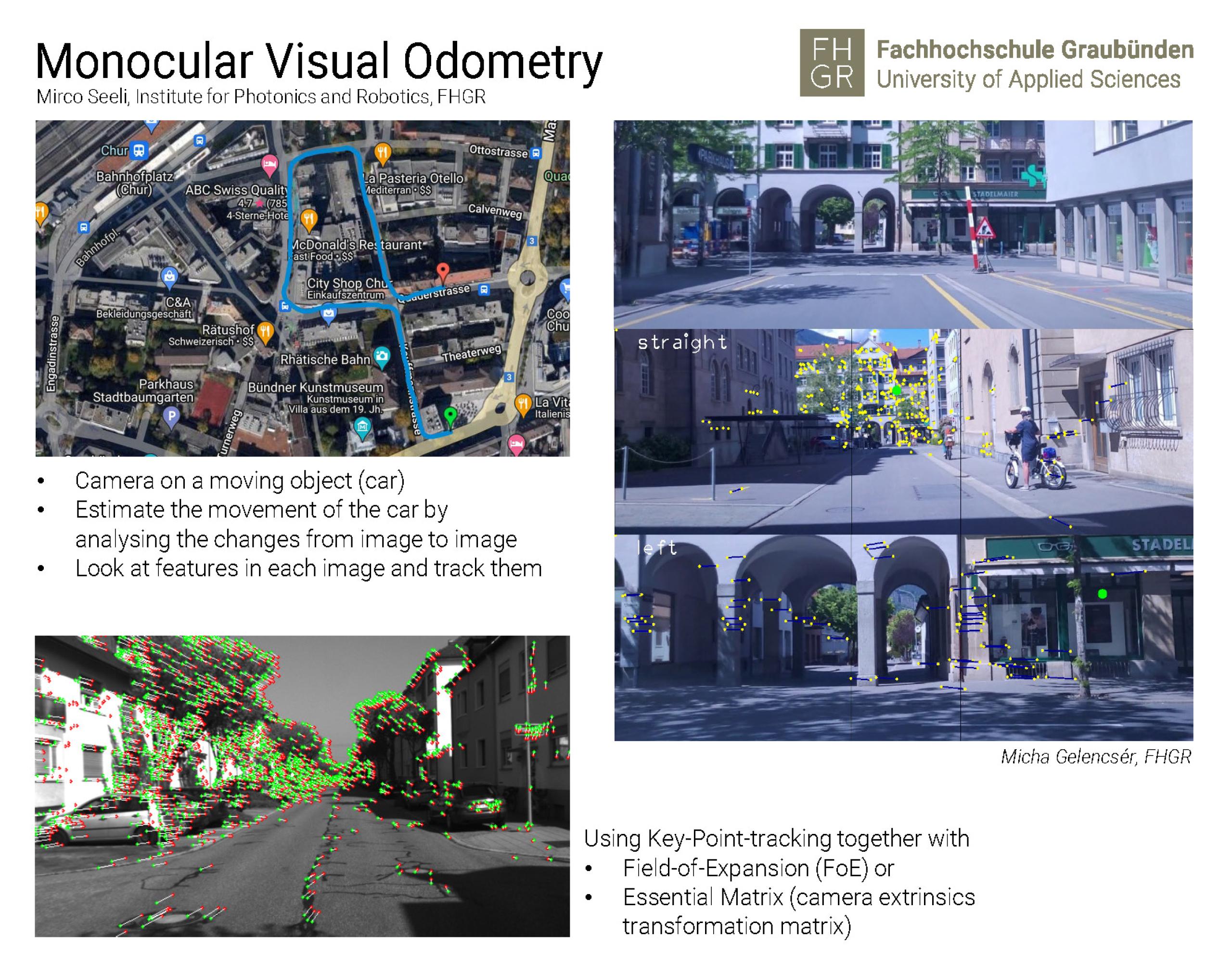
In this paper, we investigate the reliability of methods for determining the position of moving vehicles such as cars or drones relative to their origin using images acquired from a 2D camera attached to the moving object. Our software employs keypoints extracted from these 2D images and tracks these keypoints across subsequent images. For this purpose, we evaluate two methods: (a) determination of the field of expansion by analyzing the vanishing point of lines drawn between matching keypoints in consecutive images, and (b) extraction of the essential matrix to derive the transition matrix for the camera's extrinsic parameters (position and orientation). Additionally, we investigate the robustness of these methods in the absence of ground truth position data, such as GPS information. The shift in the position data as extracted by our method in combination with the image acquisition times provides an estimate of the vehicle velocity, yielding visual odometry. We visualize the results to illustrate the effectiveness of our approach and discuss challenges such as environmental factors and camera calibration inaccuracies.
Introduction
The determination of a moving vehicle's position is a critical task in various applications, including autonomous driving, drone navigation, pedestrian tracking, and odometry. Traditional methods rely on GPS; however, in environments where GPS signals are weak or unavailable, alternative methods become necessary. Recent advancements in computer vision have enabled the use of 2D cameras for this purpose. This paper explores two such methods: the field of expansion and the essential matrix extraction. These methods are particularly relevant for visual odometry, where the objective is to estimate the vehicle's trajectory over time using camera images.
Methodology
We make use of a four steps approach: First, we extract keypoints from each image using a robust feature detector from the opencv library such as ORB or SIFT. Second, we track keypoints across consecutive images using a feature matcher, ensuring high accuracy in the presence of environmental changes. For this, we either use a brute force keypoint matching approach or a methodology termed optical flow, implemented in the opencv image processing library. From the matches of two consecutive images, we then determine either the Field-of-Expansion (FoE), i.e. the position of the perspective vanishing point by drawing lines between matched keypoints in consecutive images and calculate the direction and magnitude of motion from the FoE. Or we directly estimate the essential matrix from matched keypoints using the five-point algorithm. In the latter approach, we derive the transition matrix for the camera's external parameters to determine the vehicle's trajectory.
Results
We validated our method using both simulated and real-world datasets, including sequences captured from moving cars and drones. Our approach demonstrated high accuracy in trajectory estimation, with performance metrics compared against ground truth data obtained e.g. from GPS or from street maps when available.
Discussion
Challenges such as environmental factors and camera calibration inaccuracies were observed. Techniques to mitigate these issues include advanced filtering methods and adaptive calibration procedures. Future work will explore integrating additional sensor data to enhance robustness.
Conclusion
This paper presents an effective method for determining the 3D position of moving vehicles using 2D camera imagery. Our keypoint tracking approach together with the two methodologies investigated for position extraction, shows promise in scenarios where GPS data is unavailable. This method is particularly suitable for visual odometry applications, offering a reliable alternative for estimating vehicle trajectories. Continued advancements in feature detection and matching algorithms will further improve the reliability and accuracy of this method.